Deterministic Pattern Recogniser Allows timescale variations in sequences for same class
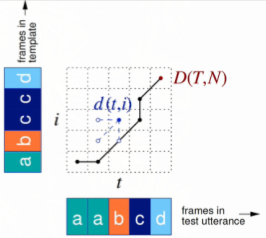
- is distance between features from -th frame of test to -th frame of template
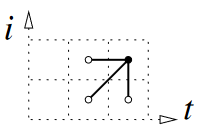
- Allowing transition from current and previous frame only
- Recursive
Problems
- How much flexibility to allow?
- How to penalise warping?
- How to determine a fair distance metric?
- How many templates to register?
- How to select best ones?
Basic Algorithm
- Initialise the cumulative distances for
- Recur for
- Finalise, the cumulative distance up to the final point gives the total cost of the match:
- Euclidean distances
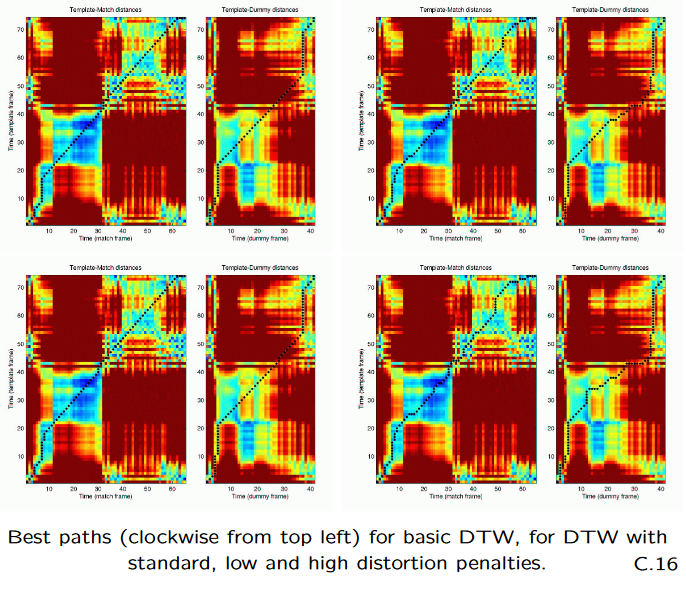
Distortion Penalty
- Initialise the cumulative distances for
- Recur for
- Where and are costs associated with vertical and horizontal transitions respectively
- Finalise, the cumulative distance up to the final point gives the total cost of the match:
- Allows weighting for dynamic penalties when moving horizontally or vertically
- As opposed to diagonally
Store Best Path
- Initialise distances and traceback indicator for
- Recur for cumulative distances at
- Final point gives the total alignment cost D(T,N) and the end coordinates of the best path , where is the number of nodes on the optimal path
- Trace the path back for
- Stores best path
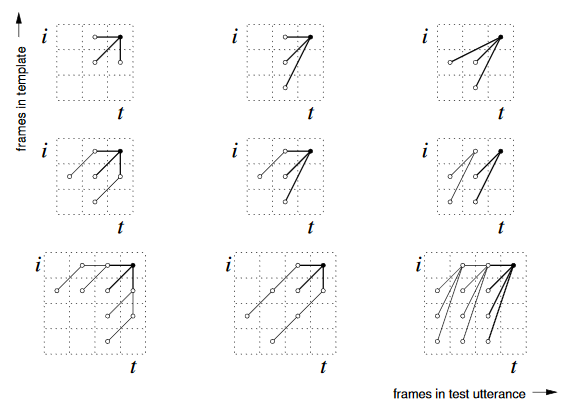
- Vary allowable movements through grid
- Second row for blocking multiple of the same movements in succession
Search Pruning
- Speed up algorithm for real-time
- Kill bad options
Gross Partitioning

- Too far from diagonal
- Probably wrong or bad
Score Pruning
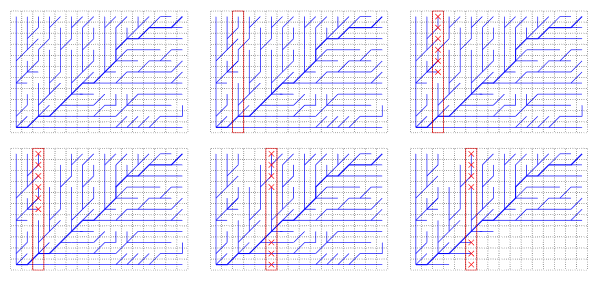
- Examine existing branches
- See which scores are really bad